




Principle of Operation (Historical)
The master compass is a device used to find the correct bearing on a pitching and rolling ship, utilizing the dynamic characteristics of a body rotating at high speed (or gyro) and gravity of the earth.
In order to have the gyro move freely regardless of the movement of a rolling and pitching ship, the gyro compass is constructed as shown in Fig.3.2.1.
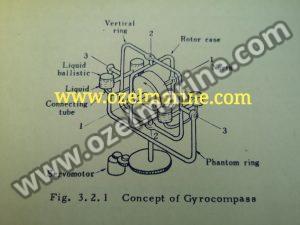
Consequently, the rotating axis 1-1 of the gyro constantly points in one direction regardless of the earth’s rotation or the movement of a ship, when considered an ideal condition.
However, since it is impossible to find a direction with only a simple, freely moving gyro, liquid ballistics are attached to the gyro as shown in the drawing to give it a North-seeking action.
To understand the operation of the gyro compass easier, the horizontal axis to maintain the gyro constantly horizontal against the rolling and pitching of a ship, has been omitted from the drawing of Fig.3.2.1. Actually, the construction of the gyro compass is as shown in Fig.3.2.2.
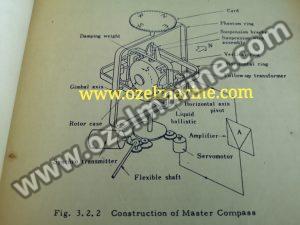
Also, to give the gyro the north-seeking action, a damping weight is fixed on the west side of the rotor case in addition to the liquid ballistics referred to before.
In addition to the above, it is necessary to understand the three items below for proper operation of the master compass. The first is that the gyro compass performs the movement for a long period of about 80 minutes; the second is that there is a latitude error and the third is that there is a speed error.
The first phenomenon is related to the fact that it requires three hours until the gyro compass points to the north and settles after it has been started and to the fact that it is necessary to adjust the level every 21 minutes for a short time settling of the gyro compass.
Since the latitude error of the second phenomenon is a fixed error determined by the latitude, it can easily be prevented with an adjustment of the latitude corrector.
The speed error of the third phenomenon also is a fixed error determined by the mutual relationship among the ship’s speed, ship’s heading and the latitude where the ship is.